







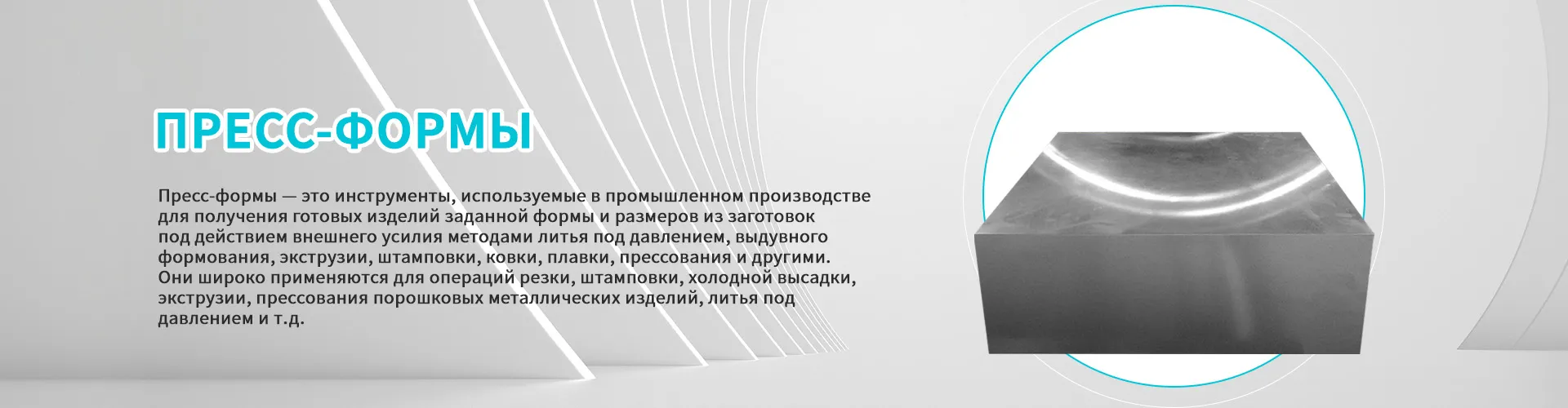
электрический гидроцилиндр
Когда говорят про электрический гидроцилиндр, многие сразу представляют себе обычный гидроцилиндр, к которому прикрутили электродвигатель. Вот тут и кроется первый, и довольно серьёзный, просчёт. На деле это комплексная система, где привод, насос, клапаны и сам цилиндр должны быть подобраны в одну 'упряжку'. Иначе получается либо 'сырая' мощность без контроля, либо дорогая игрушка. Вспоминается, как лет пять назад мы пробовали собрать агрегат для испытания пресс-форм, взяв стандартный цилиндр от пресса и поставив на него импортный сервопривод. Вроде всё сошлось по характеристикам, но плавность хода на малых скоростях была никакой — система 'дергалась'. Оказалось, проблема в золотниковом распределителе, который не был рассчитан на точное электронное управление. Пришлось переделывать, ставить пропорциональный клапан. Это был урок: ключевое здесь — не сам цилиндр, а система управления им.
Где кроется настоящая сложность?
Если копнуть глубже, то основная головная боль с электрическими гидроцилиндрами — это синхронизация. Допустим, задача поднять платформу в строго горизонтальном положении с помощью двух или четырёх цилиндров. Казалось бы, дай на все приводы одинаковый сигнал. Но на практике всегда есть разница в трении, в начальном положении штоков, в малейших утечках. Без обратной связи по положению каждого штока и умного контроллера, который компенсирует рассогласование в реальном времени, платформа пойдёт клином. Мы как-то делали стенд для испытаний строительных ферм, и заказчик сэкономил на датчиках положения, поставив только концевики. Результат — постоянный перекос в несколько миллиметров, который сводил на нет точность измерений нагрузки. Пришлось допиливать уже по ходу, интегрировать магнитострикционные датчики.
Ещё один нюанс, о котором часто забывают — тепловыделение. Электродвигатель и насосная группа, работающие в повторно-кратковременном режиме с частыми пусками и остановками, греются. И если в станке с ЧПУ есть система охлаждения, то в мобильном оборудовании или в тесном промышленном шкафу это проблема. Видел случаи, когда из-за перегрева масла менялась его вязкость, а следом 'плыли' и параметры работы всего электрического гидроцилиндра. Терялась точность позиционирования. Поэтому сейчас при расчёте всегда закладываю запас по мощности привода и обязательно смотрю на возможность установки компактного теплообменника, даже если заказчик морщится от увеличения стоимости.
И конечно, выбор рабочей жидкости. Не любое масло подходит для систем с высоким динамическим откликом. Особенно если в схеме используются высокоточные пропорциональные клапаны. Частицы износа от работы насоса или от самого цилиндра могут их заклинить. Поэтому фильтрация — не пункт для экономии. Рекомендую ставить фильтры тонкой очистки, не ниже класса 10 по ISO, и обязательно с индикатором загрязнения. Это мелочь, но она спасает от внезапных простоев.
Опыт и практические кейсы
В моей практике был показательный проект для лесозаготовительного комплекса. Нужно было модернизировать манипулятор для сортировки бревен, заменив чисто гидравлическую систему с множеством рычагов управления на 'электрическую' версию с джойстиком. За основу взяли стандартные телескопические гидроцилиндры, но оснастили их сервоприводами и блоками управления от Bosch Rexroth. Самым сложным оказалось не собрать hardware, а написать и отладить программу для контроллера, которая бы учитывала инерцию стрелы с грузом и компенсировала 'раскачку'. Оператор привык к рычагам, где он чувствовал усилие, а здесь — электронный джойстик. Пришлось вводить переменные коэффициенты усиления в зависимости от вылета стрелы и веса груза. После настройки производительность выросла на треть, но путь к этому был долгим, с неделями полевых испытаний.
А вот пример менее удачный, но поучительный. Пытались сделать компактный электрический гидроцилиндр для медицинского подъемника. Требования: бесшумность, абсолютная плавность, компактность. Решили использовать аксиально-поршневой насос с регулируемым рабочим объемом и бесщеточный двигатель. Всё получилось тихим и точным, но стоимость узла вышла запредельной для серийного производства. Заказчик отказался. Вывод: технологическая красота должна быть оправдана экономически. Иногда надежное шаговое решение на стандартных компонентах лучше, чем идеальное, но золотое.
В этом контексте стоит упомянуть компании, которые занимаются качественной механической базой для подобных решений. Например, ООО Цзиюань Чжунжунь Тэган Машиностроение (https://www.zrjx.ru). Это предприятие в сфере механической обработки, и их сильная сторона — как раз изготовление точных корпусов, штоков, поршней для гидроагрегатов. Когда нужен нестандартный цилиндр под конкретные габариты или с особыми требованиями к чистоте поверхности штока (что критично для долговечности уплотнений), обращение к специализированному производителю с мощной технической базой, как у них, спасает положение. Их сайт стоит глянуть, если нужны надежные компоненты 'под ключ'. Потому что собрать систему — это одно, а иметь качественные механические 'полуфабрикаты' — это уже половина успеха.
Тонкости интеграции и наладки
Наладка — это отдельная песня. Подключил провода, залил масло — и не работает. Частая история. Современные приводы требуют грамотной параметризации. Прошивка контроллера, настройка ПИД-регуляторов для контуров давления и положения, калибровка датчиков — без этого цилиндр будет просто тупо выдвигаться и втягиваться. А нам часто нужны сложные циклы: быстрый подвод, медленный рабочий ход с постоянным усилием, выдержка, возврат. Всё это программируется. И здесь кроется ловушка для инженеров, привыкших к чистой механике: нужно хотя бы базовое понимание программирования ПЛК и умение работать с софтом для настройки сервоприводов.
Ещё один практический совет по монтажу. Датчик положения (например, линейный потенциометр или магнитный) часто ставят прямо на шток или корпус цилиндра. Крепление должно быть жёстким, но без перекоса. Видел, как из-за вибрации крепёжная скоба датчика постепенно разбалтывалась, и показания начинали 'прыгать'. Система пыталась компенсировать несуществующее движение, в итоге цилиндр начал работать рывками. Проблема искалась два дня — проверяли и клапаны, и настройки контроллера. А оказалось — механика.
И про трубопроводы. Для систем с высоким динамическим откликом нельзя ставить обычные гибкие рукава высокого давления. Они 'растягиваются' под давлением, что вносит задержку и снижает жесткость системы. Нужны специальные рукава с минимальным коэффициентом удлинения, а в идеале — жёсткие трубки. Это увеличивает сложность монтажа, но кардинально улучшает точность позиционирования, особенно в системах с обратной связью.
Взгляд в будущее и итоговые соображения
Куда всё движется? Тренд — на интеллектуализацию. Встроенные датчики давления и температуры прямо в цилиндр, диагностика состояния уплотнений по косвенным признакам (падение скорости при том же сигнале управления может говорить об износе), предиктивное обслуживание. Электрический гидроцилиндр перестаёт быть просто исполнительным механизмом, он становится источником данных о процессе. Это открывает новые возможности, но и требует новой культуры обслуживания от персонала.
В итоге, возвращаясь к началу. Электрический гидроцилиндр — это не замена одной технологии другой. Это переход на качественно иной уровень управления силовыми процессами. Он даёт точность, программируемость, энергоэффективность (насос работает только когда нужно движение). Но цена за это — возросшая сложность проектирования, монтажа и, главное, наладки. Его нельзя просто 'воткнуть' вместо обычного гидроцилиндра. Нужно проектировать систему целиком, с умом, учитывая массу нюансов от механики до программной логики. И тогда это мощный инструмент. Нет — так это будет дорогая и капризная железяка.
Поэтому, если берётесь за такой проект, не экономьте на этапе проектирования и на компонентах. И ищите надежных партнёров по механической части, вроде упомянутого ООО Цзиюань Чжунжунь Тэган Машиностроение. Потому что даже самая умная электроника не заставит хорошо работать цилиндр с кривой обработкой гильзы или некачественными уплотнениями. Всё начинается с механики. А электроника лишь раскрывает её потенциал.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Корпус гидроцилиндра
Корпус гидроцилиндра -
 Надвижная гильза
Надвижная гильза -
 Пресс-брикетировочный агрегат
Пресс-брикетировочный агрегат -
 Штамповый блок
Штамповый блок -
 Гофрирующий валок
Гофрирующий валок -
 Валки холодной прокатки
Валки холодной прокатки -
 Форма для ретортных труб восстановления металлического магния
Форма для ретортных труб восстановления металлического магния -
 Втулка из алюминиевой фольги для прокатного стана
Втулка из алюминиевой фольги для прокатного стана -
 Центратор
Центратор -
 Центробежная литейная машина
Центробежная литейная машина -
 Реторта для восстановления металлического магния
Реторта для восстановления металлического магния -
 Насосная штанга
Насосная штанга